Le auto completamente autonome potrebbero non arrivare molto presto, ma probabilmente trarremo tutti beneficio dalla tecnologia di guida autonoma mentre aspettiamo. Tra articoli appassionanti e tweet audaci è probabile che anche tu, come molti di noi, abbia pensato che i veicoli completamente autonomi fossero dietro l’angolo, pronti ad inaugurare l’alba di un futuro privo di incidenti e ingorghi stradali. Purtroppo, preparati alla delusione. Un decennio di ingenti investimenti nella tecnologia robocar ha generato notevoli progressi, eppure l’arrivo di un’auto veramente senza conducente che può andare ovunque, in qualsiasi momento e senza aiuto umano, rimane ritardato indefinitamente.
Nonostante l’affermazione sicura di Elon Musk secondo cui Tesla sarebbe in grado di implementare nei suoi veicoli la capacità di “guida autonoma” entro la fine del 2020, il mondo appare ancora troppo diversificato e imprevedibile e i robot troppo costosi e inaffidabili perché le auto possano gestire tutte le variabili che ad oggi affrontano i conducenti umani.
Anche John Krafcik, CEO di Waymo (la grown-up a cui è affidato il progetto di auto a guida autonoma di Google), è d’accordo e a tal proposito ha anche dichiarato l’anno scorso che “l’autonomia avrà sempre alcuni vincoli”. Tale realtà ha spinto i team di AV (autonomous vehicles) ad abbracciare un “design operativo”, puntando con la loro tecnologia ad assolvere quei compiti specifici che possono essere gestiti ora o presto.
Intanto ci chiediamo, le auto a guida autonoma sono sicure per le nostre città? In teoria potrebbero salvare migliaia di vite all’anno, ma è opportuno testarli sulle nostre strade pubbliche? E in definitiva, le auto autonome possono guidare meglio degli umani?
Quali sono i vantaggi?
Il più grande vantaggio in termini di sicurezza di un veicolo autonomo è che in quanto robot e non essere umano, un AV è programmato per obbedire a tutte le regole della strada. In sostanza non supera i limiti di velocità consentiti o non può essere distratto da un messaggio di testo che lampeggia su un telefono, per esempio e, almeno ipoteticamente, può anche rilevare ciò che gli umani non riescono a percepire, specialmente di notte o in condizioni di scarsa illuminazione e reagire più rapidamente per evitare una collisione.
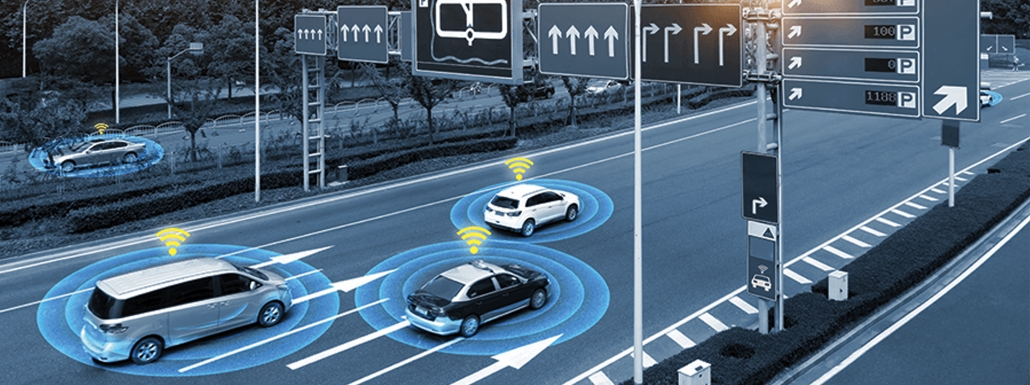
Gli AV infatti sono carichi di sensori e software che lavorando insieme creano il quadro completo della strada, in questo senso, la tecnologia chiave è LIDAR, ovvero un “sensore di rilevamento e raggio di luce” che funziona in modo molto simile al radar, ma invece di inviare onde radio emette impulsi di luce infrarossa e misura quanto tempo questi impiegano a tornare dopo aver colpito gli oggetti vicini. Quest’operazione viene svolta milioni di volte al secondo, e permette di compilare i risultati in una cosiddetta “nuvola di punti”, che funziona come una mappa tridimensionale del mondo in tempo reale, una mappa così dettagliata da poter essere utilizzata non solo per individuare oggetti ma per identificarli. Una volta in grado di identificare gli oggetti, il computer dell’auto può prevedere come si comporteranno e quindi come dovrebbe guidare il veicolo.
Oltre a LIDAR, i sensori radar possono misurare le dimensioni e la velocità degli oggetti in movimento e le telecamere ad alta definizione possono effettivamente leggere qualsiasi segnale. Mentre l’auto viaggia, fa riferimento a tutti questi dati e la tecnologia GPS colloca il veicolo all’interno di una città, permettendo così di pianificare il suo percorso. Oltre ai sensori e alle mappe, gli AV eseguono programmi software che prendono decisioni in tempo reale su come la macchina navigherà rispetto ad altri veicoli, esseri umani o oggetti sulla strada.
L’etica
Qui la questione sfiora l’ambito dell’etica, poiché gli ingegneri possono sicuramente guidare le auto attraverso simulazioni, ma il software deve anche imparare a “prendere decisioni” nelle situazioni di guida reali. Ecco perché i test nel mondo reale e su strade pubbliche sono così importanti.
Considerando che circa il 94% degli incidenti è causato da errori umani, sembra quasi ovvio che per ridurre il numero di incidenti serva proprio ridurre il numero di esseri umani al volante.
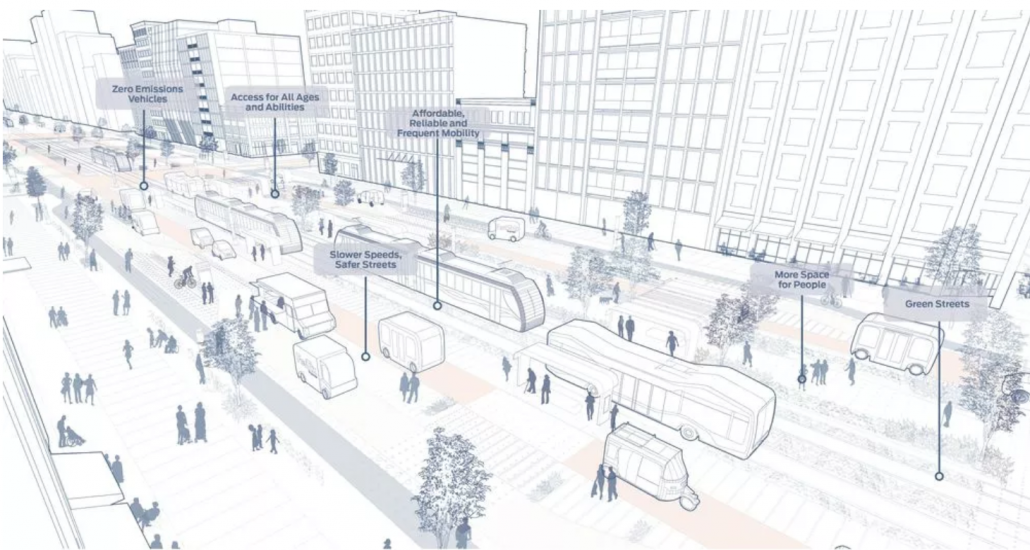
Tuttavia non è solo il numero di conducenti umani che potrebbe essere ridotto notevolmente, ma anche il numero stesso di auto sulle strade ed è per questo che università e amministrazioni pubbliche, oltre alle compagnie private, sono interessate ai veicoli autonomi. La vera promessa di sicurezza è di fatto la possibilità che questi veicoli possano essere convocati su richiesta, instradati in modo più efficiente e facilmente condivisi, il che significa che non solo il numero complessivo di autovetture su strada diminuirebbe, ma che grazie a sistemi di “microtransito” vi sarebbe un minor numero di persone in auto e più persone che viaggiano in modi più sicuri grazie al trasporto pubblico.

Il caso Uber
Tuttavia dopo che un veicolo a guida autonoma di Uber ha colpito e ucciso la 49enne Elaine Herzberg, che stava attraversando la strada con la sua bici a Tempe, in Arizona, il 18 marzo 2018, ci sono più domande che mai sulla sicurezza di questo tecnologia. Secondo un rapporto di maggio 2018 di The Information, il veicolo di Uber avrebbe rilevato la dona 6 secondi prima del suo fatale incidente, eppure “il software di Uber ha deciso che non era necessario reagire immediatamente” ed ha frenato solo a 1,3 secondi prima dell’impatto. Fatto confermato anche dal rapporto preliminare del National Transportation Safety Board (NTSB). Nonostante tutto, i pubblici ministeri dell’Arizona non hanno accusato Uber, poiché “non esiste alcuna base di responsabilità penale per la società Uber derivante da questa questione”, anche se ”un guidatore in questo caso avrebbe potuto reagire e fermare il veicolo 42,61 piedi prima del pedone”, si legge nel rapporto, che definisce l’incidente “del tutto evitabile”.
Per evitare conseguenze gravi di questo tipo, molte aziende sottopongono i loro veicoli a test su strade simulate di città. Molte case automobilistiche tradizionali usano una struttura chiamata M City ad Ann Arbor, nel Michigan, oppure come accade per le più grandi compagnie, ognuna di esse utilizza città ricostruite ad hoc per testare le interazioni con gli umani che non sono nei veicoli. La finta città di Waymo, chiamata Castle, ha persino un capannone pieno di oggetti di scena, che potrebbero essere usati dalle persone sulle strade, in modo tale che gli ingegneri di Waymo possano imparare ad identificarli. Dopo il fatale incidente di Uber, anche Toyota ha costruito una nuova struttura per testare le risposte dei suoi veicoli a “casi limite” e situazioni estreme troppo pericolose per essere testate sulle strade pubbliche.

La tecnologia già in uso
Se oggi solo i residenti di poche città possono chiamare un AV su richiesta, la verità è che gran parte della tecnologia di sicurezza che alimenta le auto a guida autonoma si sta facendo strada nelle auto di oggi. I sofisticati sistemi di prevenzione delle collisioni, ad esempio, che possono fermare un veicolo se un oggetto o una persona vengono rilevati sul suo percorso, sono già incorporati nelle nuove auto e anche nei nuovi autobus. Tuttavia, se fino a poco tempo fa, tutti gli standard di sicurezza erano basati su dati storici degli incidenti, monitorati per anni e anni, ora la tecnologia sta avanzando così rapidamente che non c’è abbastanza tempo per testare ogni nuova idea per un decennio e per questo, potrebbero già diventare standard su tutti i veicoli, quelle caratteristiche che appaiono come un chiaro vantaggio in termini di sicurezza come la comunicazione veicolo-veicolo (V2V).

Ad oggi il modo migliore per capire il mondo del self-driving è non tanto interrogarsi su quando arriverà, ma dove, come e per chi verrà sviluppato. Ecco quindi alcuni esempi concreti:
Navette Driver-free: vere e proprie navette a guida autonoma che circolano per i tratti più affollati dei centri urbani e già presenti in città come Detroit e Columbus, Ohio. Unico trucco: i percorsi sono estremamente limitati, in genere solo pochi chilometri e talvolta viene affiancato un autista umano con il ruolo di supervisore della tecnologia.
- Quando sarà pronto: Probabilmente nei prossimi anni
- Key player: May Mobility , Ultra Global PRT
Utilitarie e piccoli veicoli per Campus: spazi definiti come università, quartieri residenziali e strutture abitative per anziani sono il terreno di prova ideale per gli AV: il traffico si muove lentamente, le persone seguono orari prevedibili e le strade sono ben segnalate. Ecco perché alcune aziende stanno debuttando in suddivisioni a Boston, in California e Florida.
- Quando sarà pronto: i programmi pilota sono già in fase di sviluppo
- Key player: Optimus Ride , Voyage
Robotaxis: saranno la soluzione su cui la maggior parte delle persone probabilmente si imbatterà, un po’ come Uber, ma senza i guidatori di Uber, queste auto ti porteranno in giro in una città o in un quartiere, con alcune restrizioni.
- Quando saranno pronti: nel prossimo decennio
- Key player: Aptiv, Ford’s Argo AI , GM’s Cruise , Uber, Waymo , Zoox
Droidi di consegna: siti e-commerce e Amazon Prime stesso hanno creato un sistema mostruosamente inefficiente in cui camion rumorosi e sporchi sono sempre presenti anche nelle strade residenziali più silenziose. Piccoli veicoli elettrici autonomi, che navigano per strada o sul marciapiede, potrebbero essere la risposta, portando generi alimentari, pasti e pacchetti a portata di mano.
- Quando saranno pronti: i programmi pilota sono già sviluppati
- Key player: Amazon , Marble , Nuro , Starship
Almeno per il prossimo futuro quindi, i veicoli completamente autonomi dovranno ancora fare i conti con gli errori dei conducenti umani, ma è chiaro che per rendere veramente la tecnologia di guida autonoma il più sicura possibile, tutti i veicoli su strada dovrebbero essere completamente autonomi e quindi non solo programmati per obbedire alle regole della strada, ma anche per comunicare tra loro e prendere decisioni “umanamente corrette” in qualsiasi situazione reale.

